Binocular camera depth calibration method, device and system and storage medium
A binocular camera and calibration method technology, which is applied in stereo systems, image data processing, instruments, etc., can solve the problems of low calibration accuracy, slow depth calibration process of binocular cameras, etc., and achieve the effect of accurate depth calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The implementation mode of the present invention is illustrated by specific specific examples below, and those who are familiar with this technology can easily understand other advantages and effects of the present invention from the contents disclosed in this description. Obviously, the described embodiments are a part of the present invention. , but not all examples. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
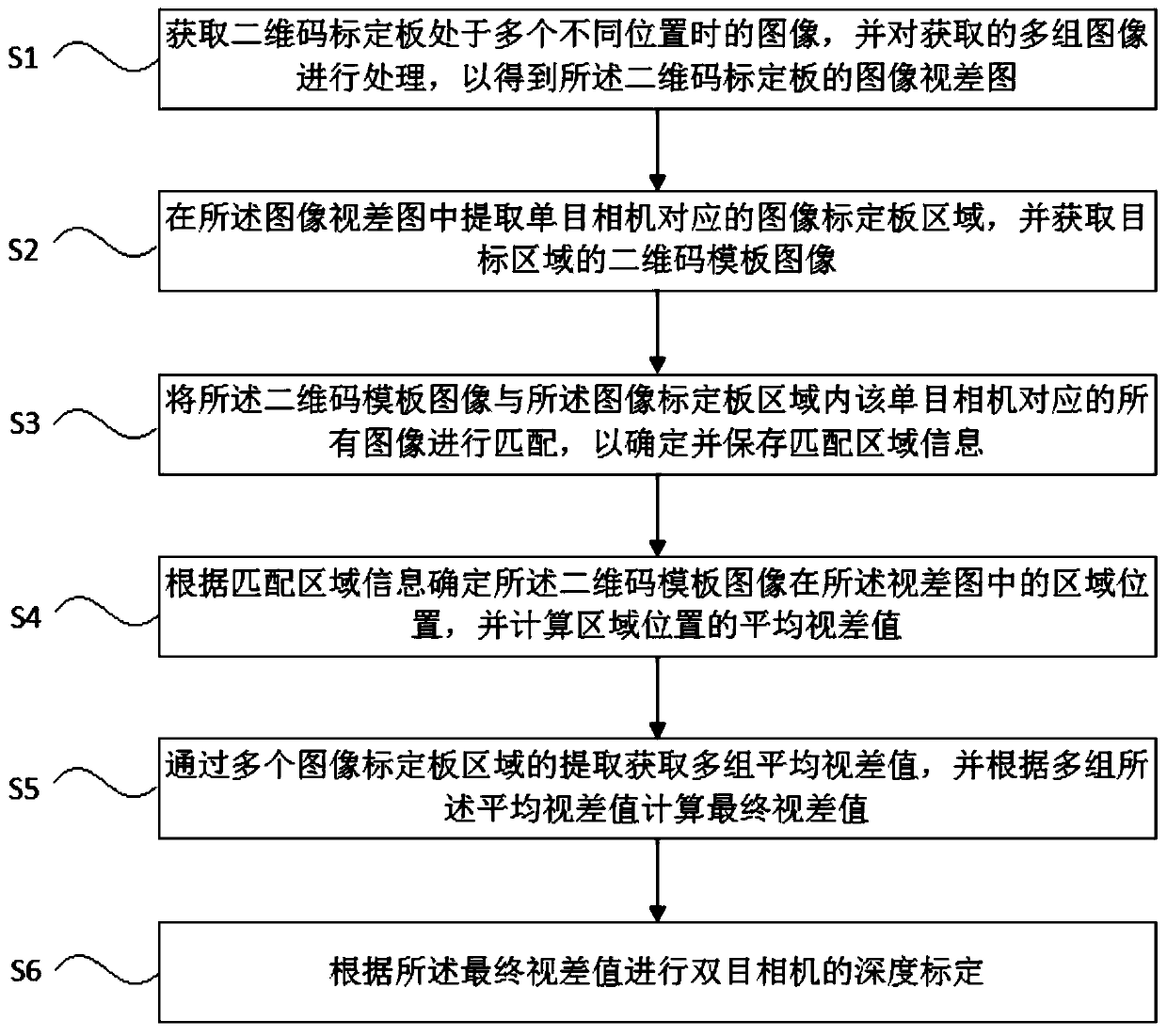
[0055] The binocular camera depth calibration method provided by the present invention realizes fast and accurate depth calibration by using a method of matching the position of a two-dimensional code calibration plate on the basis of binocular visual parallax information. In a specific embodiment, such as figure 1 As shown, the method includes the following steps:
[0056]S1: Acquire the images o
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap