Method and device for determining collision risk of unmanned aerial vehicle
A collision risk and UAV technology, applied in the computer field, can solve problems such as low efficiency and large amount of calculation for identifying UAVs, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
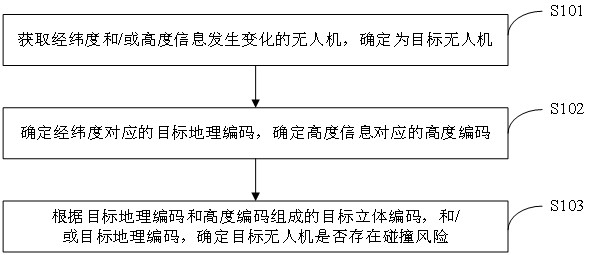
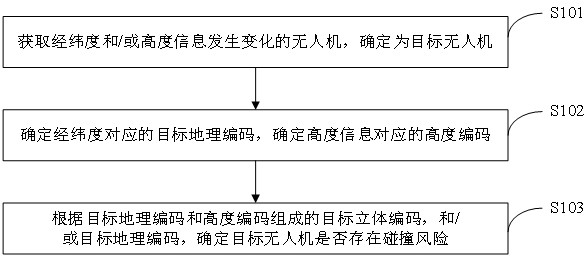
[0063] Embodiment 1: Determine whether the target UAV has a collision risk according to the target stereo code composed of the target geographic code and the altitude code.
[0064] see Figure 5 , Figure 5 It is a schematic diagram of target stereo encoding in the embodiment of this application. That is to say, in the flying airspace, the target UAV is located in Figure 5 The spatial region corresponding to the target stereo code wtmk4rbp001110 is shown.
[0065] see image 3 , image 3 It is a flow chart of determining whether the target UAV has a collision risk according to the target stereo code composed of the target geographic code and the altitude code provided by the embodiment of the present application. Such as image 3 As shown, the embodiment of the present application provides a target stereo code composed of a target geographic code and an altitude code to determine whether the target UAV has a collision risk, including the following steps:
[0066] S10311.
Embodiment 2
[0072] Embodiment 2: According to the geographic code of the target, it is determined whether the target UAV has a collision risk.
[0073] see Figure 4 , Figure 4 It is a flow chart of determining whether a target UAV has a collision risk according to the target geocode provided by the embodiment of the present application. Such as Figure 4 As shown, the determination of whether the target UAV has a collision risk according to the target geocoding provided by the embodiment of the present application includes the following steps:
[0074] S10321. Obtain geocodes adjacent to the target geocode.
[0075] Wherein, the geocodes adjacent to the target geocode refer to the geocodes of the grids adjacent to the grid corresponding to the target geocode.
[0076] The adjacent geocoding in the embodiment of the present application refers to creating a nine-square grid with the target geocode as the center, and the remaining eight geocodes of the nine-square grid except the central
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap