Unmanned boat global path planning method
A technology of global path planning and path planning, applied in the directions of road network navigators, measuring devices, instruments, etc., can solve the problems of no comparison, inefficient planning time, and no planning efficiency, and achieve the effect of improving the search speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
[0045] The present invention provides a kind of unmanned boat global path planning method combining JPS+ algorithm and GoalBounding algorithm, comprises the following steps:
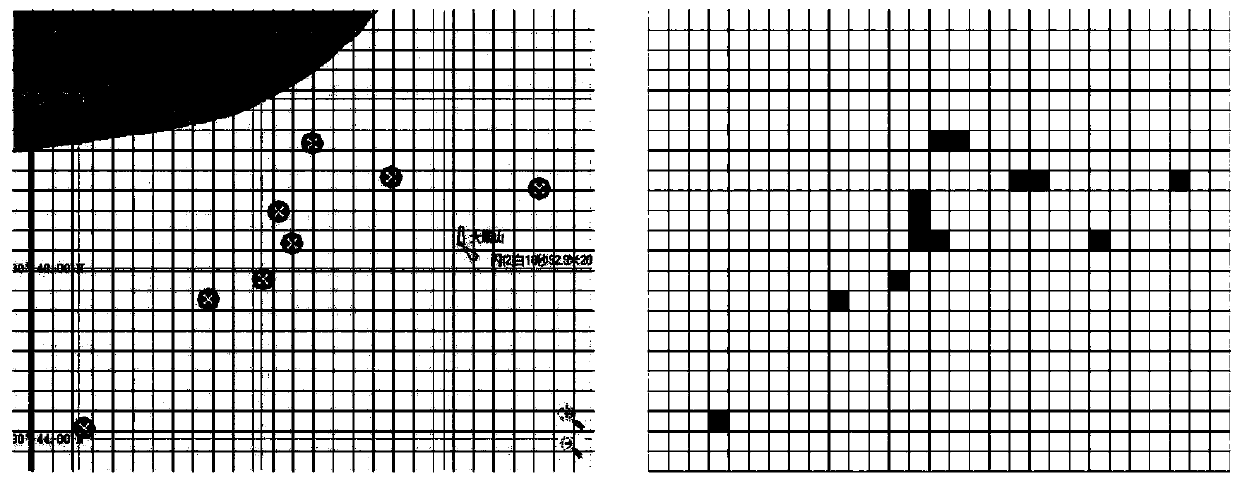
[0046] Step 1): Establish a coordinate system with the upper left corner as the starting point, and divide the displayed electronic chart into grids of a selected size, such as figure 1 As shown in the figure on the left (the dots and black squares in the figure indicate obstacles), and select adjacent vertex coordinates such as (lat1, lng1) and (lat2, lng2), calculate the distance between two adjacent vertex coordinates by the following formula, Obtain the side length of each grid, which is convenient for subsequent judgment of the grid where the obstacle is located:
[0047]
[0048]
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap