Quick map updating method and device adapting to unknown dynamic space and storage medium
A map update, map technology, applied in database update, image data processing, graphic image conversion and other directions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0049] This example provides a fast map update method adapted to unknown dynamic space, which is used to improve the efficiency of map update in uncertain environment in unknown dynamic space.
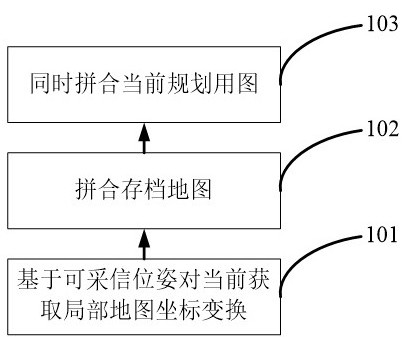
[0050] Such as Figure 1~2 As shown, the method for this example includes the following steps:
[0051] Step 101, refer to the admissible pose to perform coordinate transformation on the currently acquired local map.
[0052] Coordinate transformation, specifically, P=P 0 +R'(Ω)*P t Among them, P is a point in the global position coordinates, P 0 is the coordinate of the origin of the local map in the global map, R'(Ω) is the transpose of the direction cosine matrix of the attitude angle Ω, which represents the rotation projection of the local map to the global map, P t is the coordinate of any point in the local map.
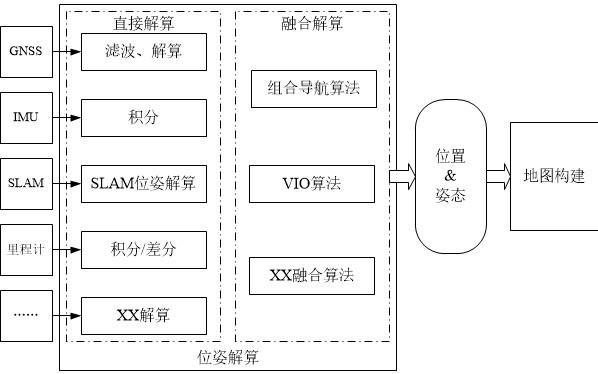
[0053] image 3 Data control flow graph for pose sources used for map building.
[0054] The admissible pose can be the result of a certain calculation after be...
Embodiment 2
[0090] This example provides a fast map updating device adapting to unknown dynamic space.
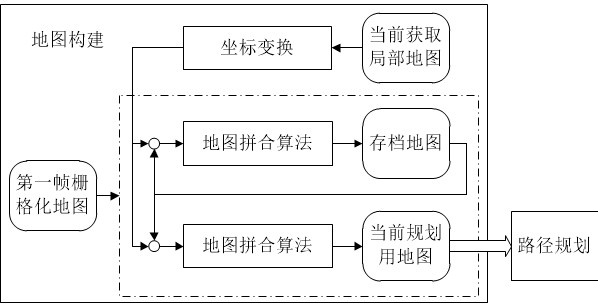
[0091] Such as Figure 4 As shown, the update device in this example includes a transform module and a merge module. The transformation module is connected to the flattening module.
[0092] Specifically, the transformation module is used to transform the coordinates of the currently acquired local map through the acceptable pose; the stitching module is used to stitch together the current archived map and the current planning map according to the coordinate transformed local map combined with the original archived map ;The current archived map is used as the original archived map of the next frame; where: the archived map is a global map used to record immovable obstacles or parts of the environment that have not changed; the current planning map is a global planning map or a local planning map for recording The current environment can be used directly for path planning.
[0093] T...
Embodiment 3
[0113] A computer-readable storage medium, on which a computer program is stored, and when the computer program is run by a processor, the device where the storage medium is located is controlled to execute the fast map update method for adapting to an unknown dynamic space in the above embodiment.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap