Cruise control method and device and engineering vehicle
A technology for engineering vehicles and control parameters, which is applied in hoisting devices, clockwork mechanisms, etc., can solve problems such as damage, component wear, and instability of control valves, so as to improve work stability, reduce labor intensity, and avoid disadvantages. effect of influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
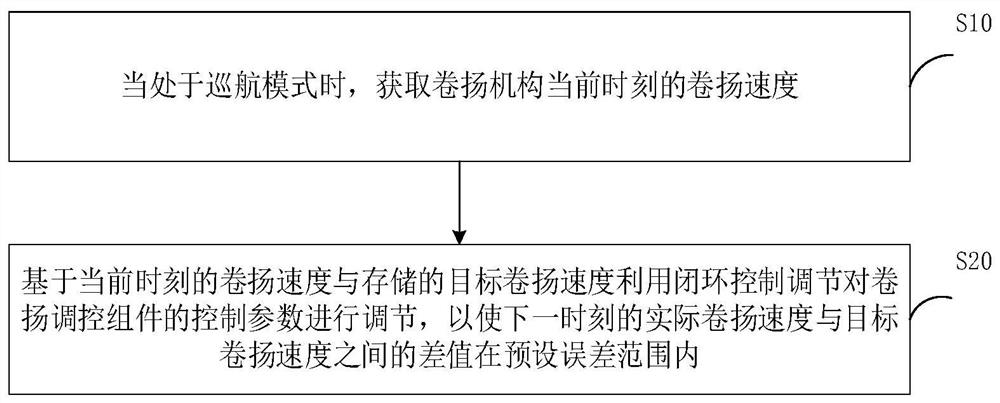
[0040] Please refer to figure 1 , this embodiment proposes a cruise control method, which can be applied to engineering vehicles with hoisting mechanisms, such as diaphragm wall grab machines, rotary drilling rigs, cranes, etc., through this cruise control method, not only the automatic cruise function of the hoisting mechanism can be realized , and in the cruising process, it can also realize the uniform motion of the winch load, which improves the working stability of the engineering vehicle.
[0041] Generally, the hoisting mechanism includes a reel, a wire rope and a load connected to the wire rope (also called a hoisting load), wherein the drive assembly can be controlled by a corresponding controller to make the reel wind the wire rope, so as to realize the lifting or lifting of the load. down operation. In this embodiment, the controller may refer to the controller located in the winch mechanism, or may be the controller of the main engine of the engineering vehicle or th
Embodiment 2
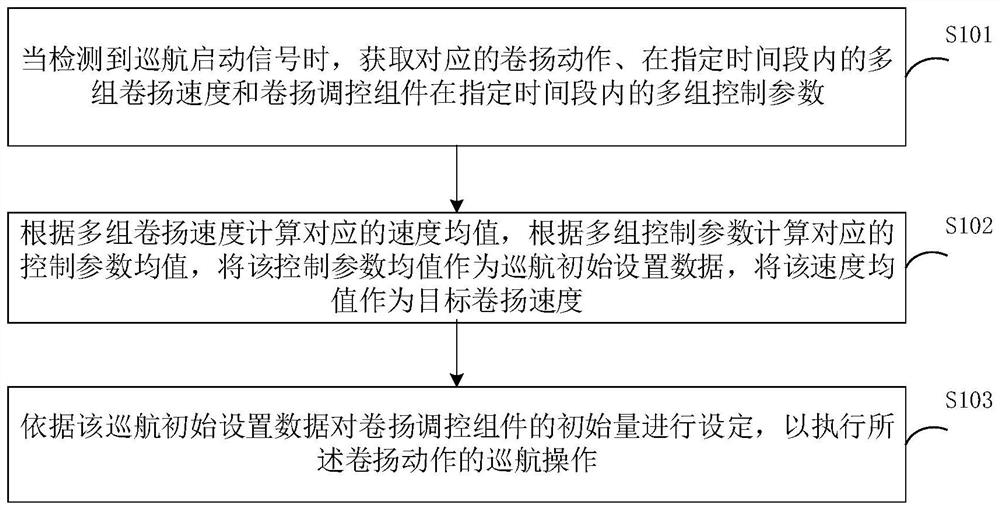
[0063] Please refer to Figure 4 , this embodiment proposes a cruise control method, the difference from the above-mentioned embodiment 1 is that since there are many components that can affect the hoisting speed, the hoisting control components of this embodiment will include two or more For example, in addition to the above-mentioned pilot handle, it may also include a driving device for driving the reel in the hoisting mechanism, such as a motor; and a main pump for providing energy for the hoisting mechanism, such as a hydraulic pump. Wherein, if the hoisting driving device is the adjusted object, the control parameters may include the displacement of the driving device; if the main pump is the adjusted object, the control parameters include the output oil volume of the main pump, etc.
[0064] Exemplarily, as Figure 4 As shown, for the above step S20, including:
[0065] Step S210, according to the preset priority selection rules, select the one with the highest priority
Embodiment 3
[0073] Please refer to Figure 8 , based on the method of the above-mentioned embodiment 1, this embodiment proposes a cruise control device 10, including:
[0074] An acquisition module 110, configured to acquire the hoisting speed of the hoisting mechanism at the current moment when in cruising mode;
[0075] The adjustment module 120 is configured to adjust the control parameters of the hoisting control component by using closed-loop control adjustment based on the hoisting speed at the current moment and the stored target hoisting speed, so that the actual hoisting speed at the next moment is the same as the said hoisting speed. The difference between the target hoisting speeds is within a preset error range.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap