Load parameter identification method, identification device, readable storage medium and robot
A technology of parameter identification and robotics, applied in the field of robotics, can solve the problems of low identification accuracy of dynamic parameters of loads and difficulty in accurately determining the material properties of parts, etc., and achieve the effect of simplifying the process, improving accuracy, and improving precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
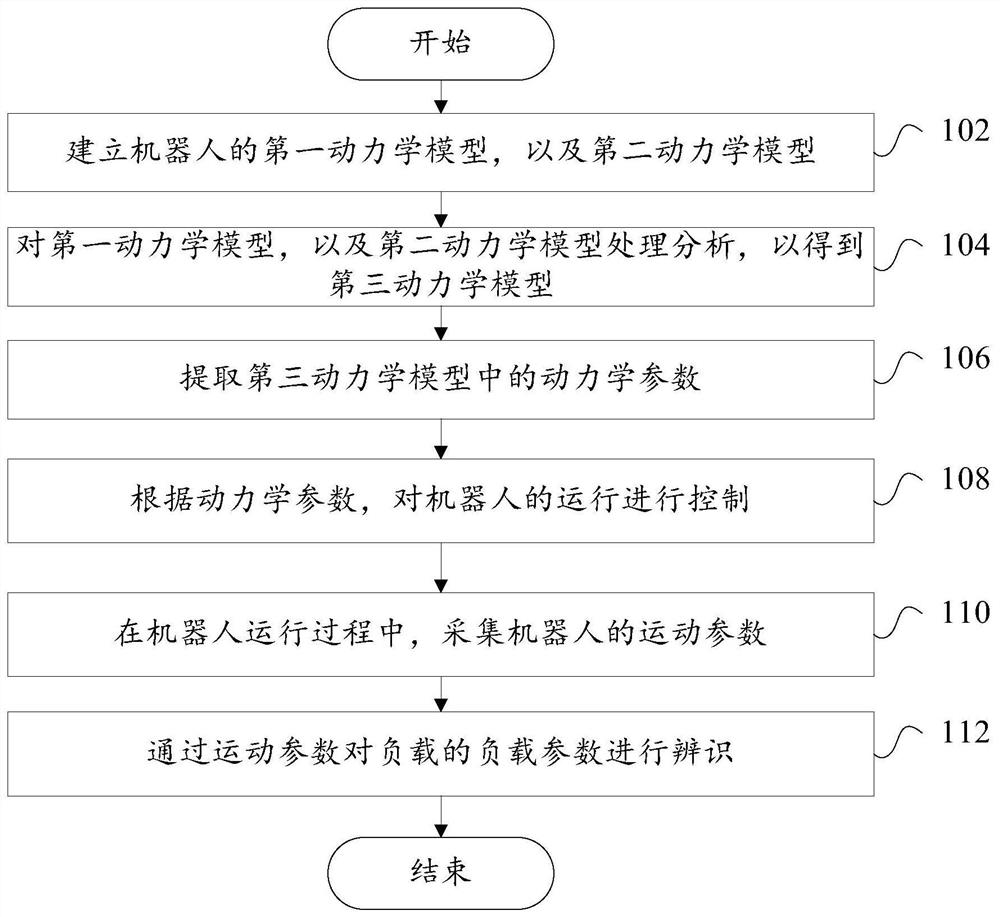
[0107] Such as figure 1 As shown, a load parameter identification method is provided in the first embodiment of the present invention. The robot includes a body capable of loading a load, and the body can drive the load to move.
[0108] Load parameter identification methods include:
[0109] Step 102, establishing a first dynamic model and a second dynamic model of the robot;
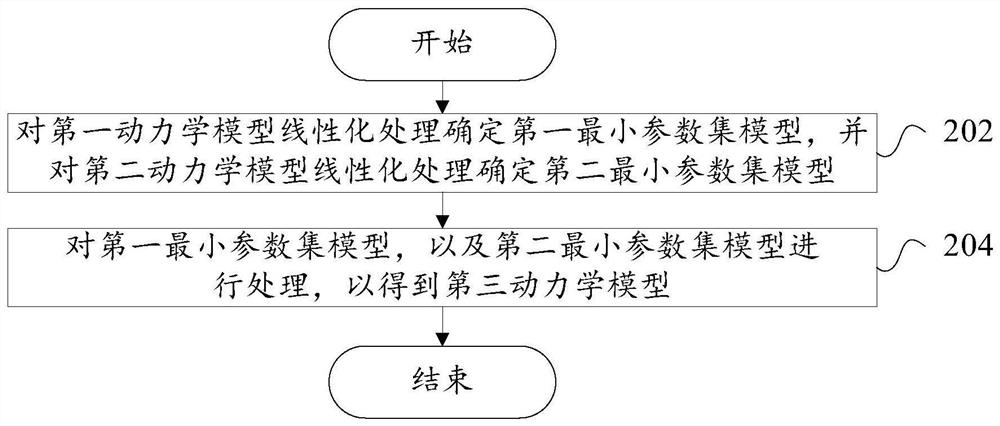
[0110] Step 104, processing and analyzing the first kinetic model and the second kinetic model to obtain a third kinetic model;
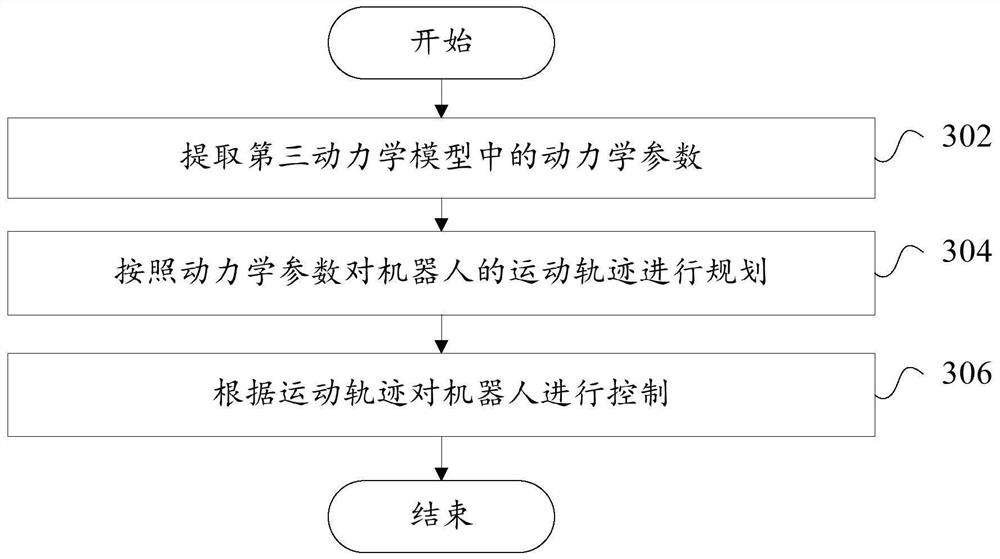
[0111] Step 106, extracting the kinetic parameters in the third kinetic model;
[0112] Step 108, controlling the operation of the robot according to the dynamic parameters;
[0113] Step 110, during the operation of the robot, collect the motion parameters of the robot;
[0114] Step 112, identifying the load parameters of the load through the motion parameters.
[0115] The load parameter identification method provided in this embodiment is used to identify the dynamic p
Embodiment 2
[0190] Such as Figure 7 As shown, the second embodiment of the present invention provides a load parameter identification device 700, the robot includes a body, the body can load a load, and the body is used to drive the load to move.
[0191] The load parameter identification device 700 includes:
[0192] An acquisition module 702, configured to establish a first dynamic model and a second dynamic model of the robot;
[0193] A determination module 704, configured to process and analyze the first kinetic model and the second kinetic model to obtain a third kinetic model;
[0194] A control module 706, configured to extract dynamic parameters in the third dynamic model, and control the operation of the robot according to the dynamic parameters;
[0195]The collection module 708 is used to collect the motion parameters of the robot during the operation of the robot;
[0196] The identifying module 710 is configured to identify the load parameters of the load through the motion
Embodiment 3
[0268] Such as Figure 8 As shown, the second embodiment of the present invention provides a load parameter identification device 800 , including: a memory 802 and a processor 804 .
[0269] There are programs or instructions stored in the memory 802, and the processor 804 executes the programs or instructions stored in the memory to implement the steps of the load parameter identification method in the first embodiment, thus having all the steps of the load parameter identification method in the first embodiment above Beneficial technical effects are not repeated here.
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap