Three-leg type magnetic field detection robot
A robotic, three-legged technology used in robotics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
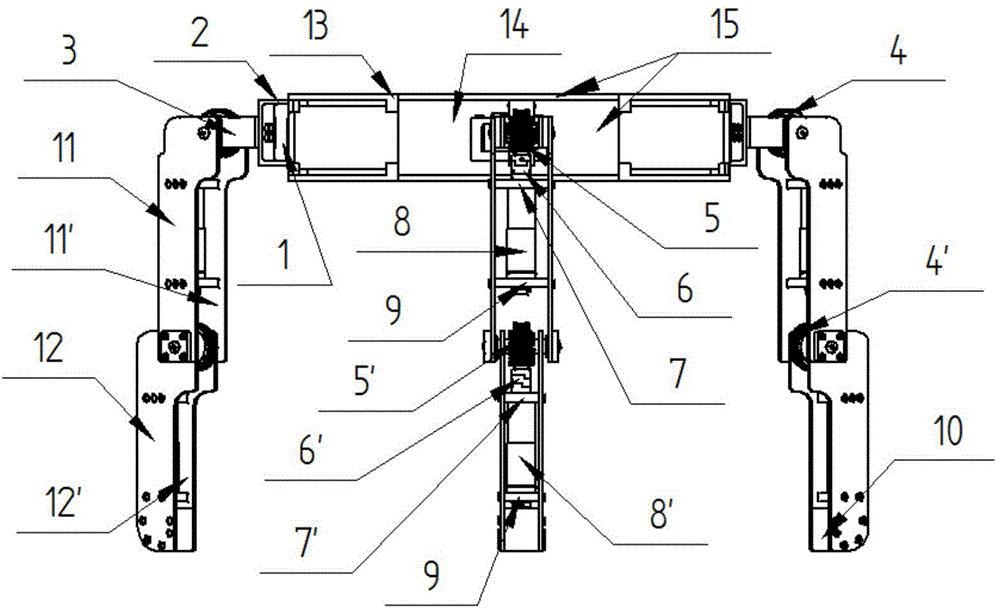
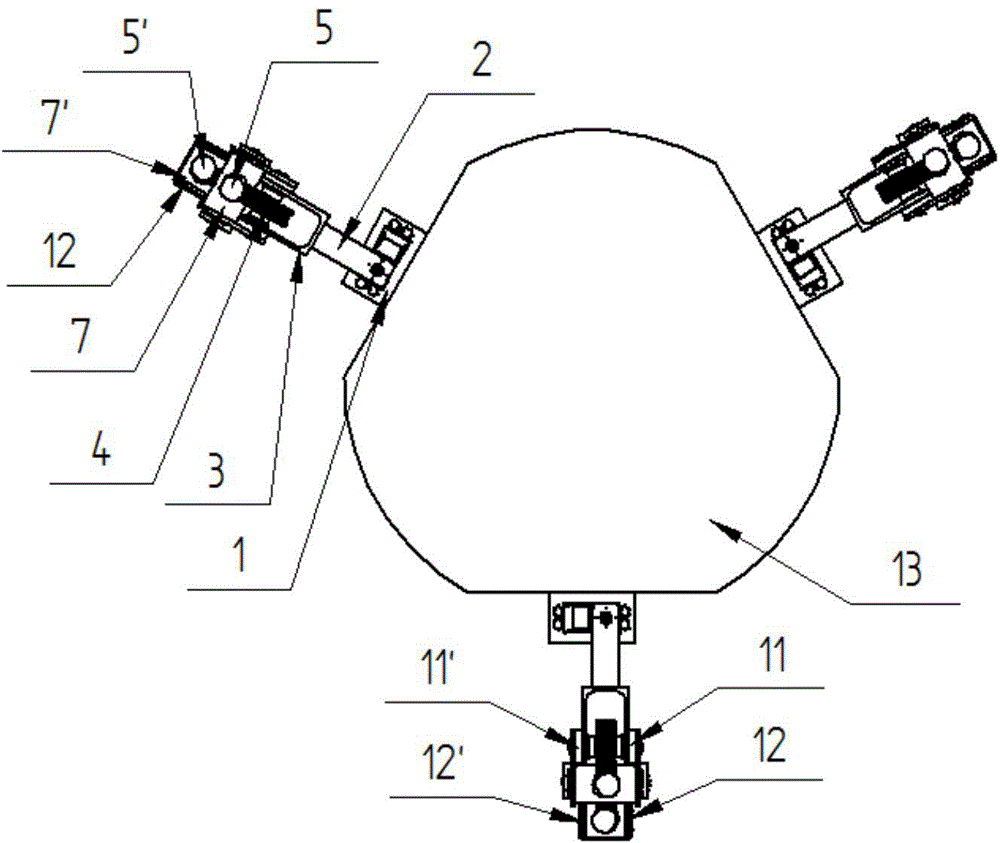
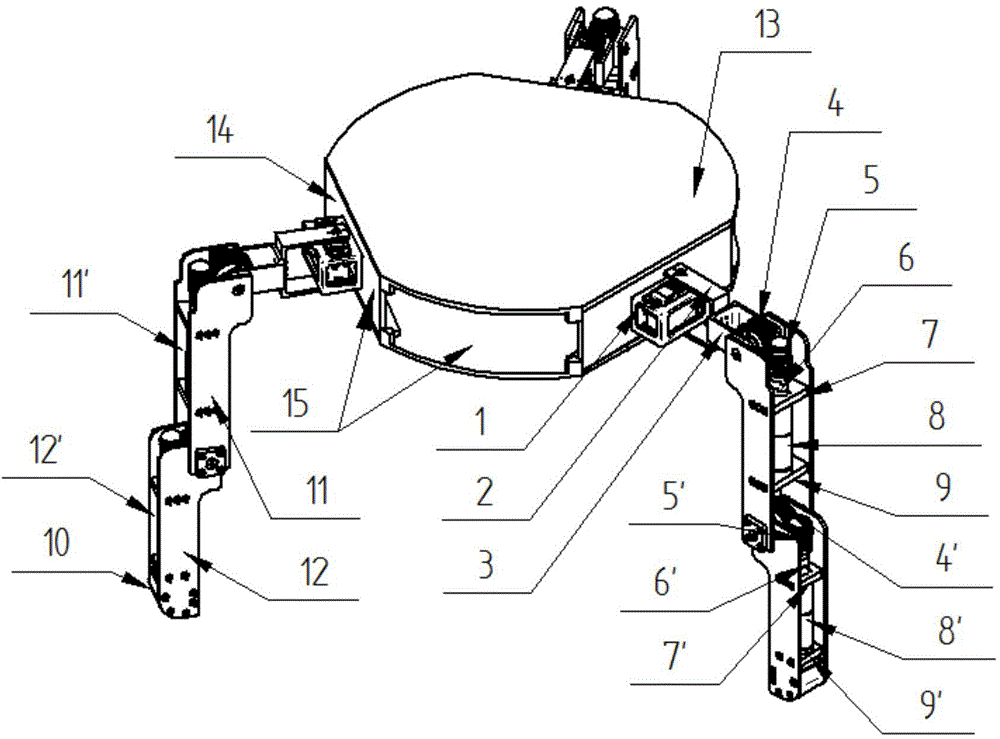
[0017] Such as Figure 1-Figure 3 As shown, the example of the invention consists of a support unit 15 and three leg units.
[0018] The support unit 15 is the basis of the entire three-legged magnetic field detection robot, and the three leg units are evenly arranged around the support unit, and the angle between any two leg units and the central line of the support unit is 120°.
[0019] The support unit 15 is composed of a top board 13 and a support unit bracket 14; two top boards 13 are arranged on the upper and lower sides of the support unit, and three support unit brackets 14 are arranged between the two top boards 13 to play a supporting role. The connection mode between the top plate 13 and the support unit bracket 14 is welding.
[0020] The three described leg units have the same structure, and each leg unit consists of a steering gea
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap