Solving method for six-degree-of-freedom series robot inverse kinematics solution
A technology of robot kinematics and degrees of freedom, applied in instruments, simulators, control/regulation systems, etc., can solve problems such as complex solutions, unstable precision of numerical solutions, and large amount of algebraic calculations, and achieve simple calculations, The effect of fast calculation speed and small calculation load
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
specific Embodiment
[0040] Table 1 Connecting rod parameters of PUMA560 robot
[0041]
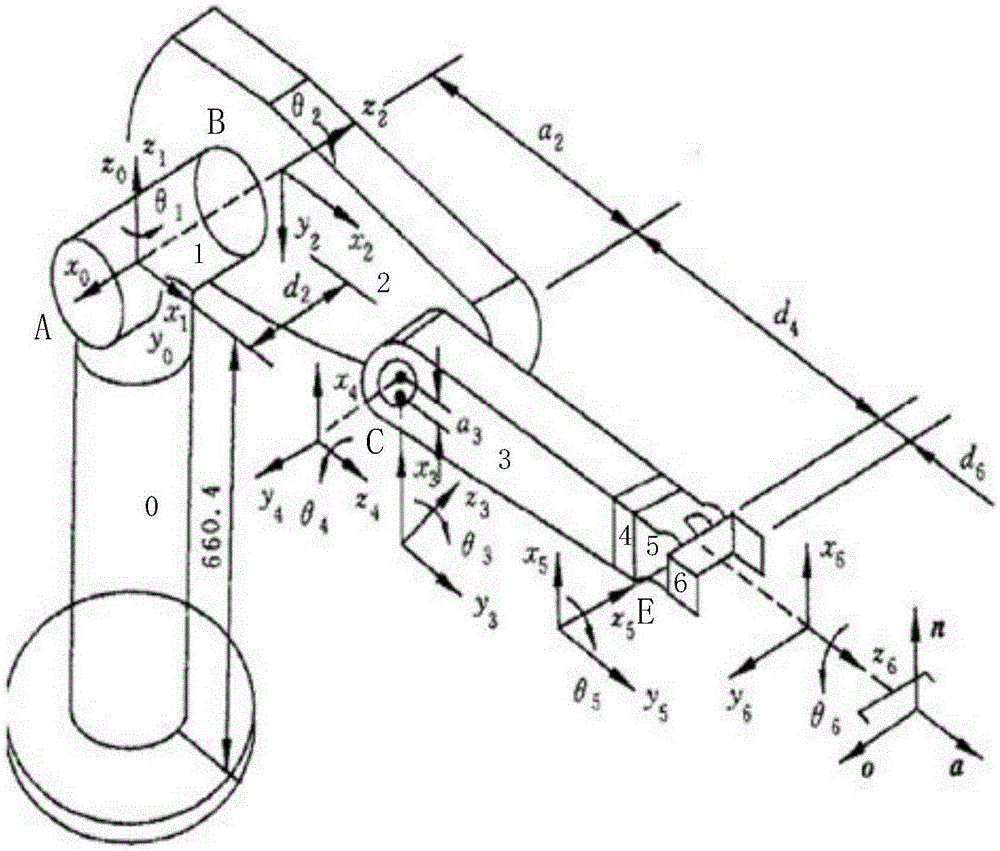
[0042] In this embodiment, the PUMA560 six-degree-of-freedom serial robot is taken as an example, and its configuration is as follows: figure 1 As shown, it includes base 0, six connecting rods (connecting rod one 1, connecting rod two 2, connecting rod three 3, connecting rod four 4, connecting rod five 5, connecting rod six 6) and six joints, A as The simplification point of joint 1, B as the simplification point of joint 2, C as the simplification point of joint 3, and E as the intersection point of the 4th, 5th and 6th axis of the joint. The connecting rod parameters of the robot are shown in Table 1.
[0043] The reverse solution process mainly includes the following steps:
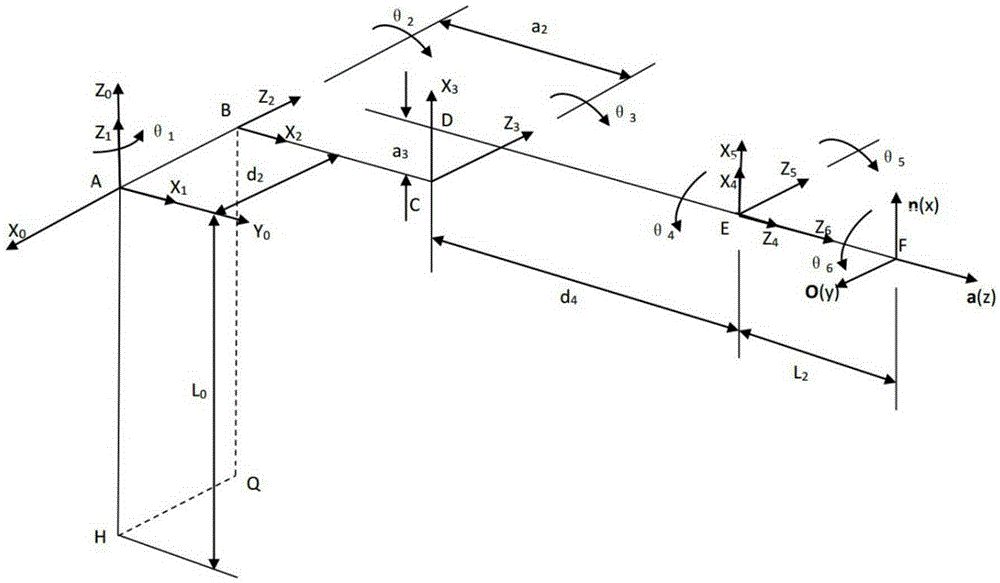
[0044] Step 1): Establish the robot link coordinate system model as figure 2 Shown: The numbers are sequentially numbered from the connecting rod connected to the base 0, which are respectively connecting rod one 1, connecting ro
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap