Graph-oriented robot operation method
An operation method and robot technology, which is applied in the directions of instruments, image enhancement, image analysis, etc., can solve problems such as the inability to meet the development requirements of high-precision robots and multiple application occasions, the unfavorable upgrading of enterprise products, and the inability to adapt to changes immediately, etc., to achieve Save learning costs, solve partial occlusion interference, and avoid the effect of cumbersome process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
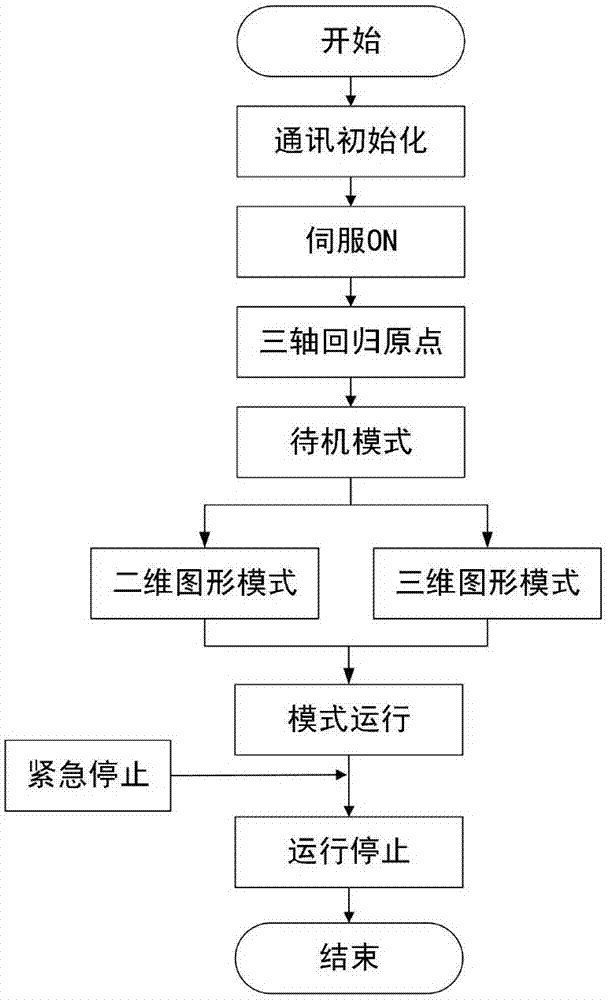
[0044] In this example, if figure 1 As shown, a graphics-oriented robot operation method is applied in an operation environment composed of a robot, a computer and two binocular cameras, and is carried out as follows:
[0045] Step 1, under the MATLAB environment of computer, set up the graphics facing robot operation, the graphics are two-dimensional graphics based on MATLAB GUI platform or three-dimensional graphics based on binocular camera;
[0046] The two-dimensional graphics based on the MATLAB GUI platform is to use the get function to obtain the trajectory graphics of the mouse from the beginning of the movement to the end of the movement in the MATLAB environment, and save the trajectory graphics as a .mat file after coordinate conversion. Represent two-dimensional graphics;
[0047] The 3D graphics based on the binocular camera is established according to the following process:
[0048] Step A. Use the binocular camera to obtain M frames of images of the tracking tar
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap