Real-time positioning method and system for target critical point of unmanned aerial vehicle and storage medium
A technology of real-time positioning and drones, applied in closed-circuit television systems, computer components, instruments, etc., can solve the problems of huge resource consumption, complex background, low false alarm rate, etc., to ensure the safety of life and property, and the algorithm is simple , the effect of low false alarm rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
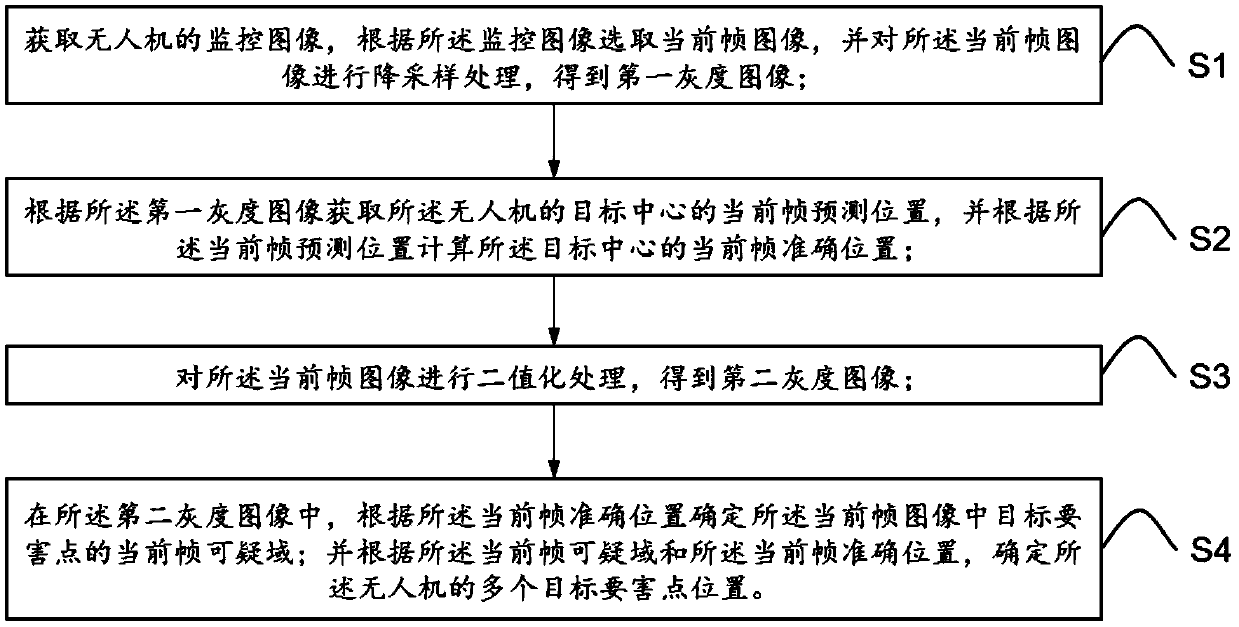
[0080] Embodiment one, as figure 1 As shown, a method for real-time positioning of UAV target key points, comprising the following steps:
[0081] S1: Obtain the monitoring image of the drone, select a current frame image from the monitoring image, and perform down-sampling processing on the current frame image to obtain a first grayscale image;
[0082] S2: Obtain the current frame predicted position of the target center of the drone according to the first grayscale image, and calculate the current frame accurate position of the target center according to the current frame predicted position;
[0083] S3: Perform binarization processing on the current frame image to obtain a second grayscale image;
[0084] S4: In the second gray-scale image, determine the current frame suspicious area of the target key point in the current frame image according to the accurate position of the current frame; and determine the current frame suspicious area and the current frame accurate positi
Embodiment 2
[0143] Embodiment two, such as Figure 9 As shown, this embodiment is a schematic structural diagram of a real-time positioning system for UAV target key points.
[0144] A real-time positioning system for key points of an unmanned aerial vehicle, comprising a monitoring unit 11, a down-sampling processing unit 12, a computing unit 13, a binarization processing unit 14, and a search unit 15;
[0145] The monitoring unit 11 is used to obtain the monitoring image of the unmanned aerial vehicle;
[0146] The down-sampling processing unit 12 is configured to select a current frame image according to the monitoring image, and perform down-sampling processing on the current frame image to obtain a first grayscale image;
[0147] The computing unit 13 is used to obtain the current frame predicted position of the target center of the drone according to the first grayscale image, and calculate the current frame accurate position of the target center according to the current frame predict
Embodiment 3
[0152] Embodiment 3, based on Embodiment 1 and Embodiment 2, the present invention also discloses a real-time positioning system for key points of UAV targets, such as Figure 10 as shown, Figure 10 It is a schematic structural diagram of another real-time positioning system for UAV target key points in the present invention, including a processor 100, a memory 200, and a computer program 300 stored in the memory 200 and operable on the processor 100. The computer program 300 implements the following specific steps when running:
[0153] S1: Obtain a monitoring image of the drone, select a current frame image according to the monitoring image, and perform down-sampling processing on the current frame image to obtain a first grayscale image;
[0154] S2: Obtain the current frame predicted position of the target center of the drone according to the first grayscale image, and calculate the current frame accurate position of the target center according to the current frame predicte
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap