Postoperative screw placement precision evaluation method
An accuracy evaluation and image technology, applied in the field of image processing, can solve the problems of image feature extraction that cannot be stably processed, poor quality of three-dimensional vertebral images, and inaccurate quantitative evaluation of the clinical accuracy of the robot system, etc., to achieve convenient confirmation and adjustment, accurate Enhanced performance and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
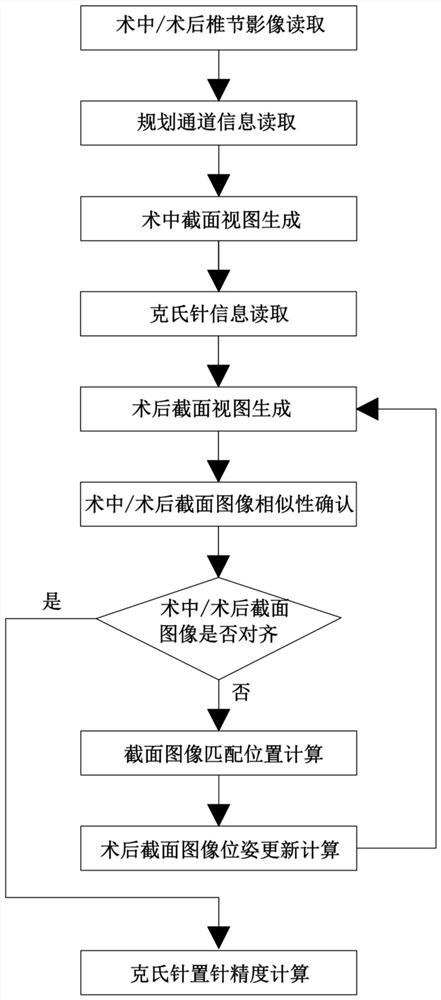
[0060] figure 1 Be the flow chart of the present invention, as figure 1 As shown, the postoperative nail placement accuracy evaluation method based on image fusion of the present invention comprises the following steps:
[0061] (1) Obtain intraoperative and postoperative vertebral images;
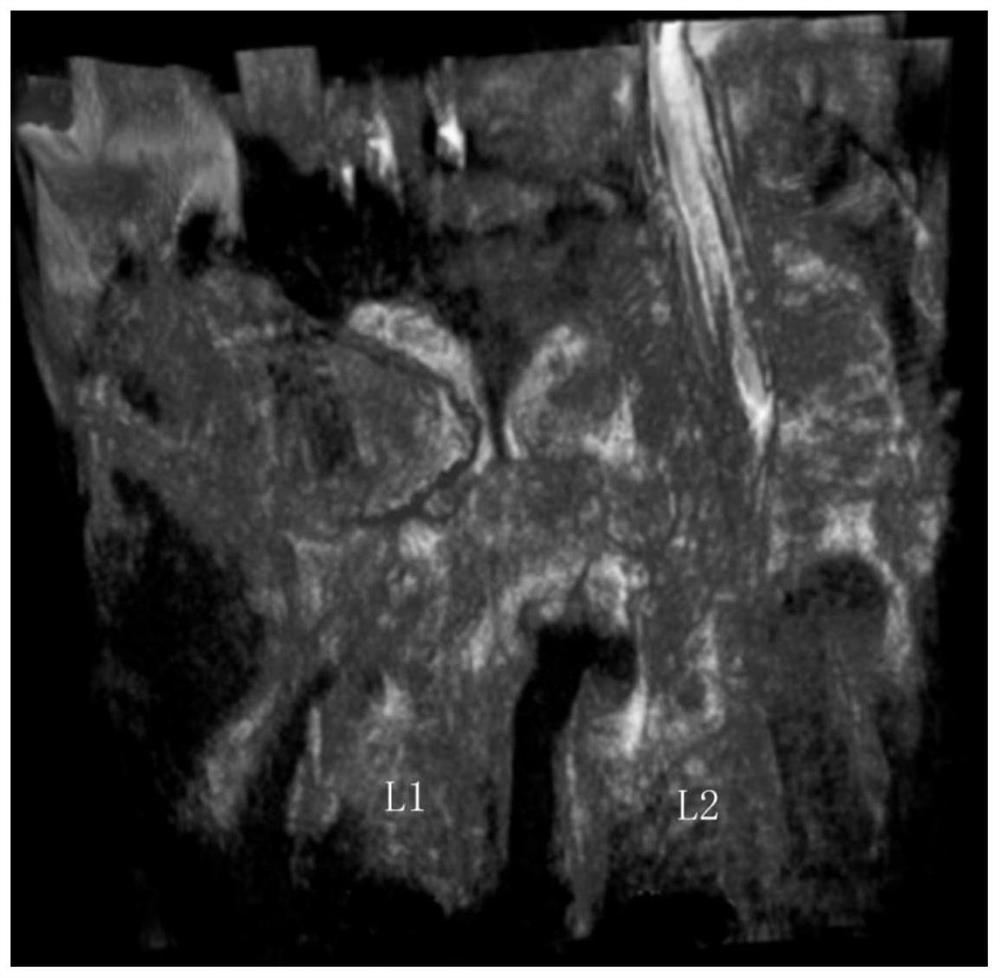
[0062] Intraoperative images of the vertebral segments were obtained by intraoperative scans (see figure 2 ), and obtain the pose of the planning channel and its first endpoint and second The coordinates of the two endpoints; because the evaluation of the accuracy of the final postoperative nail insertion channel is based on the comparison between the actual position of the postoperative Kirschner wire and the position of the planned channel, so for the evaluation of postoperative nail placement accuracy, it is necessary to obtain the planning channel. Po
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap