Mobile robot smooth trajectory planning method based on PSO parameter setting
A mobile robot and trajectory planning technology, which is applied in the direction of two-dimensional position/channel control, etc., can solve the problems of poor tracking control effect, low efficiency, tedious and time-consuming, etc., to save time for parameter debugging, improve adaptability, Curvature reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0075] In order to make the objectives, technical solutions and advantages of the present invention clearer, the technical solutions of the present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
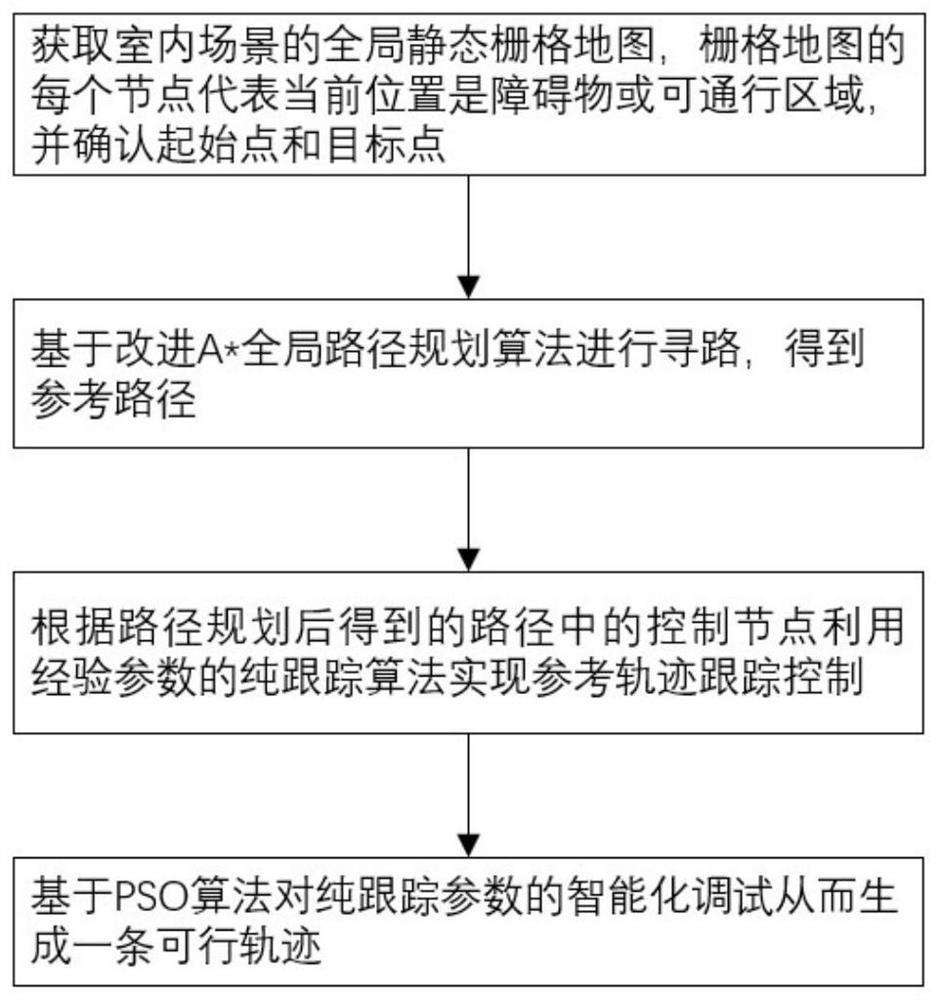
[0076] refer to Figure 1 to Figure 9 , a smooth trajectory planning method for a mobile robot based on PSO parameter tuning, comprising the following steps:
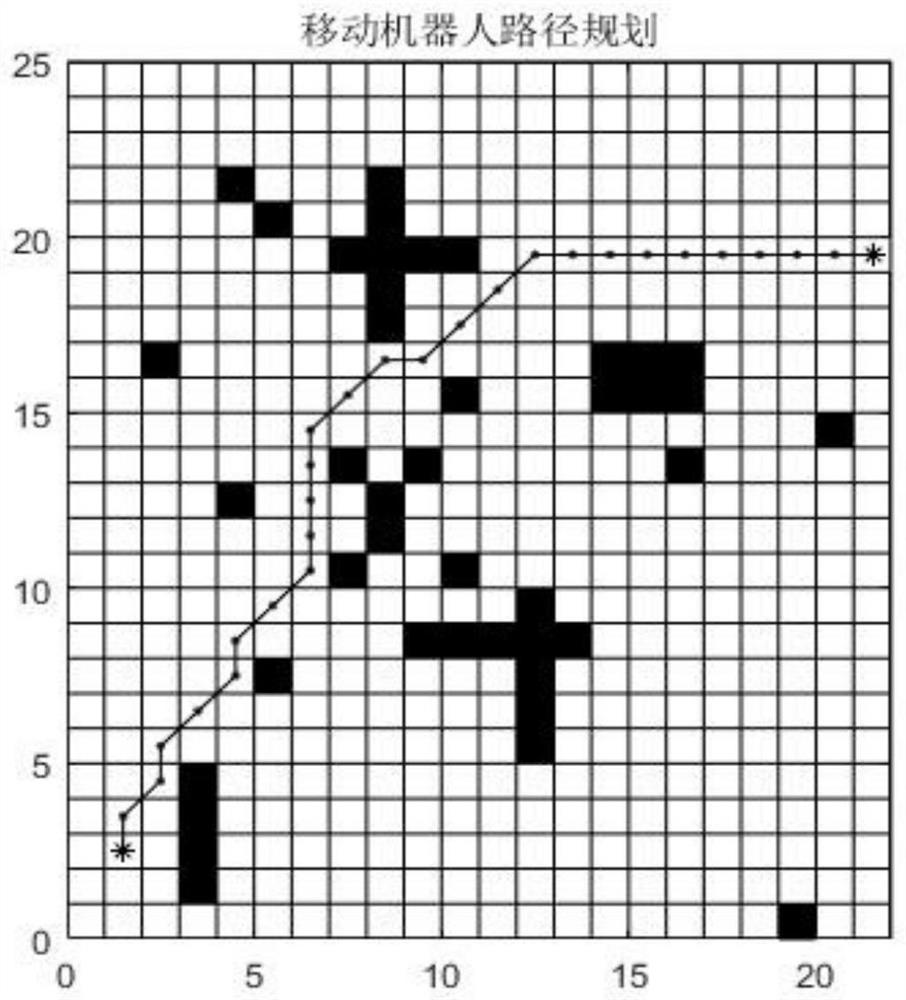
[0077] S1. Obtain a global static grid map of the indoor scene. Each node of the grid map represents that the current position is an obstacle or a passable area, and confirms the starting point and the target point;
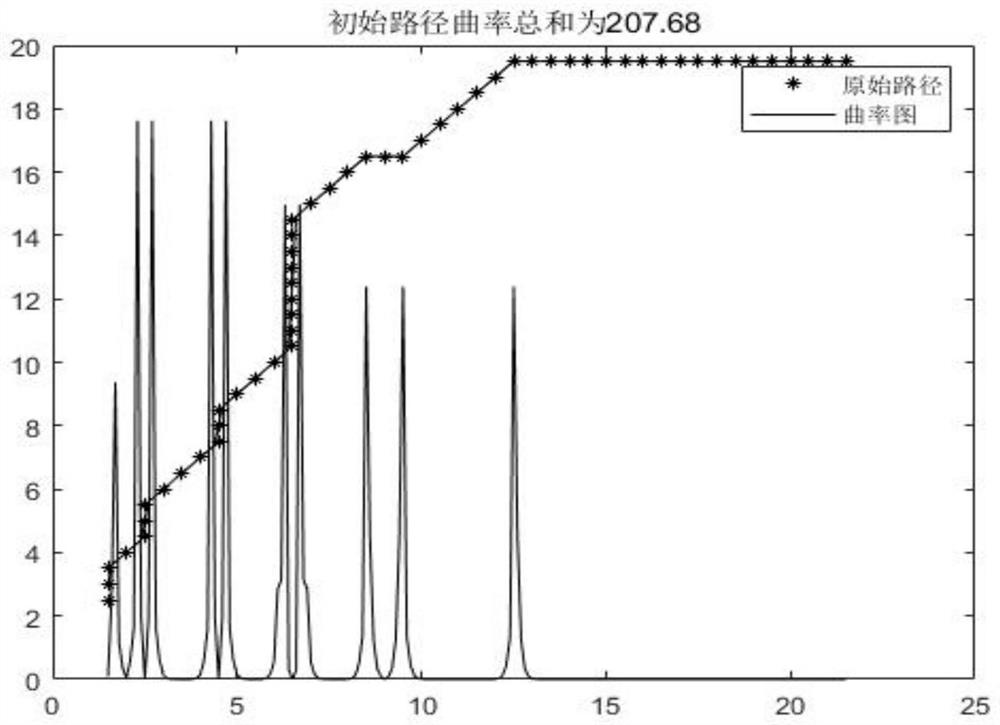
[0078] S2. Design the evaluation function of the improved A* algorithm, and perform pathfinding based on the improved A* global path planning algorithm to obtain a reference path;
[0079] S3. According to the control nodes in the path obtained after the path planning, a pure tracking algorithm of empirical parameters is used to realize the
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap