Method for correcting feedback of inertial navigation system/global position system (INS/GPS) combined navigation system based on lever arm estimation
A technology of integrated navigation system and feedback correction, applied in measurement devices, instruments, etc., can solve problems such as incomplete feedback correction, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
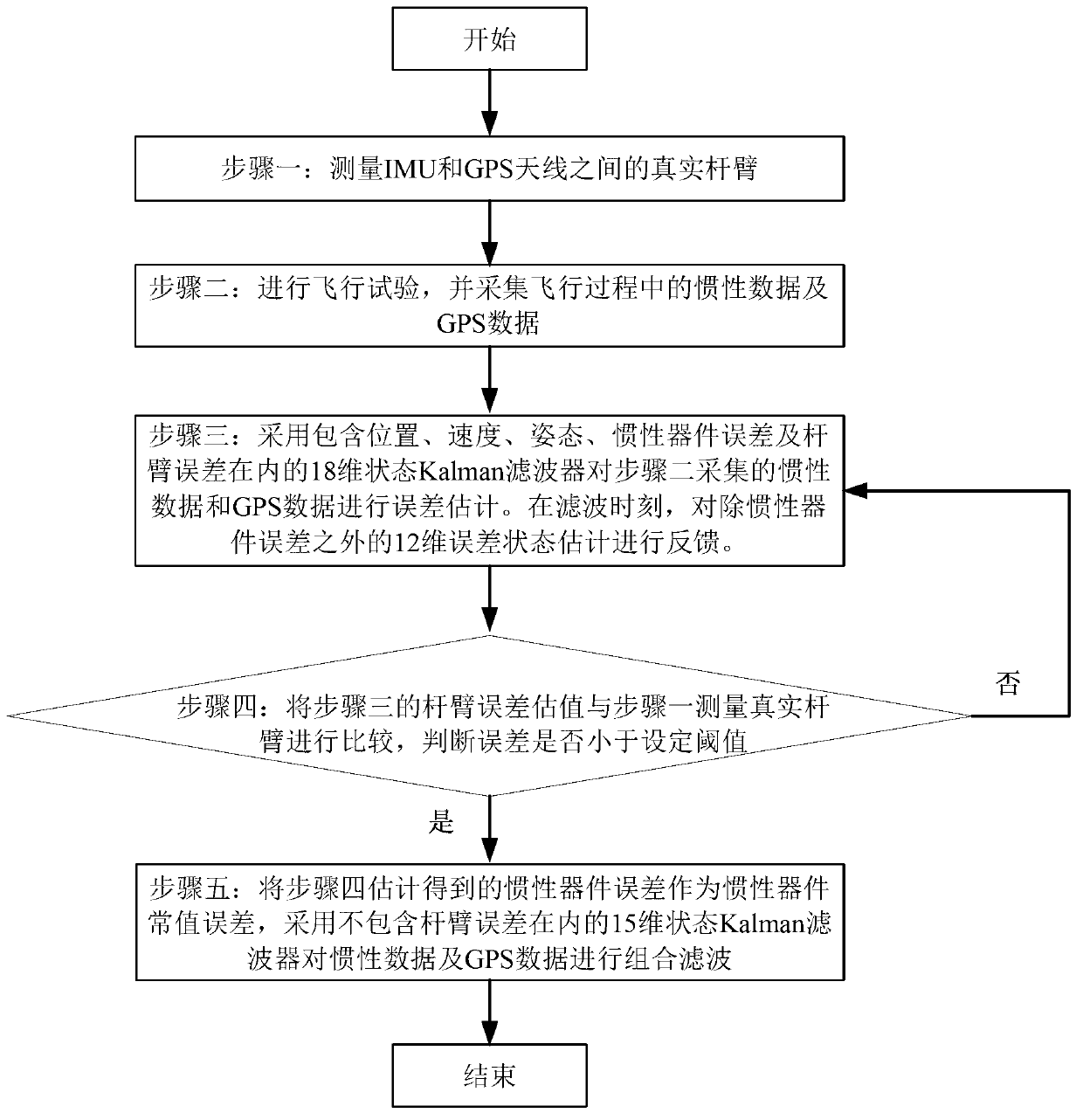
[0017] A feedback correction method for INS / GPS integrated navigation system based on lever-arm estimation is mainly divided into two stages: the first stage is an incomplete feedback correction system based on the 18-dimensional system error state model including the lever-arm error; The stage is the full feedback correction stage of the 15-dimensional system error state model not including the lever-arm error.
[0018] Concrete implementation steps of the present invention are as follows:
[0019] (1) Before the flight test, use the laser total station to measure the real lever arm R between the IMU and the GPS antenna in the INS / GPS integrated navigation system t ;
[0020] (2) Collect the inertial measurement data and GPS data of the INS / GPS integrated navigation system during the flight test, where the inertial measurement data includes the three-axis gyroscope data and three-axis accelerometer data The gyroscope data of the x, y, and z axes are expressed as
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap