Obstacle feature extraction method based on millimeter wave radar and laser radar
A millimeter-wave radar and lidar technology, which is used in the re-radiation of electromagnetic waves, the reflection/re-radiation of radio waves, and character and pattern recognition. The effect of increasing the processing speed and ensuring safe driving
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] In order to make the objectives, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings.
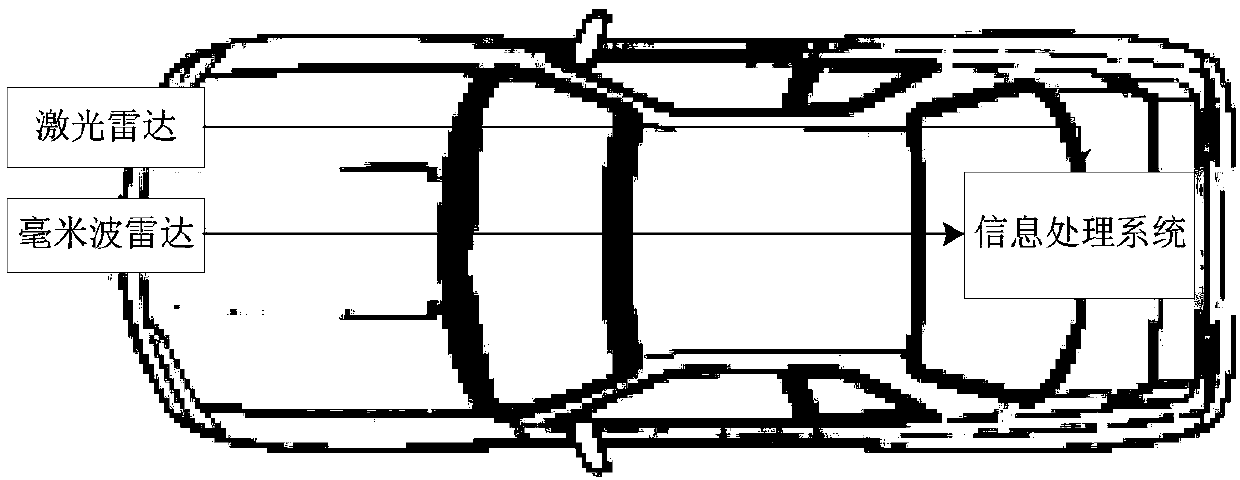
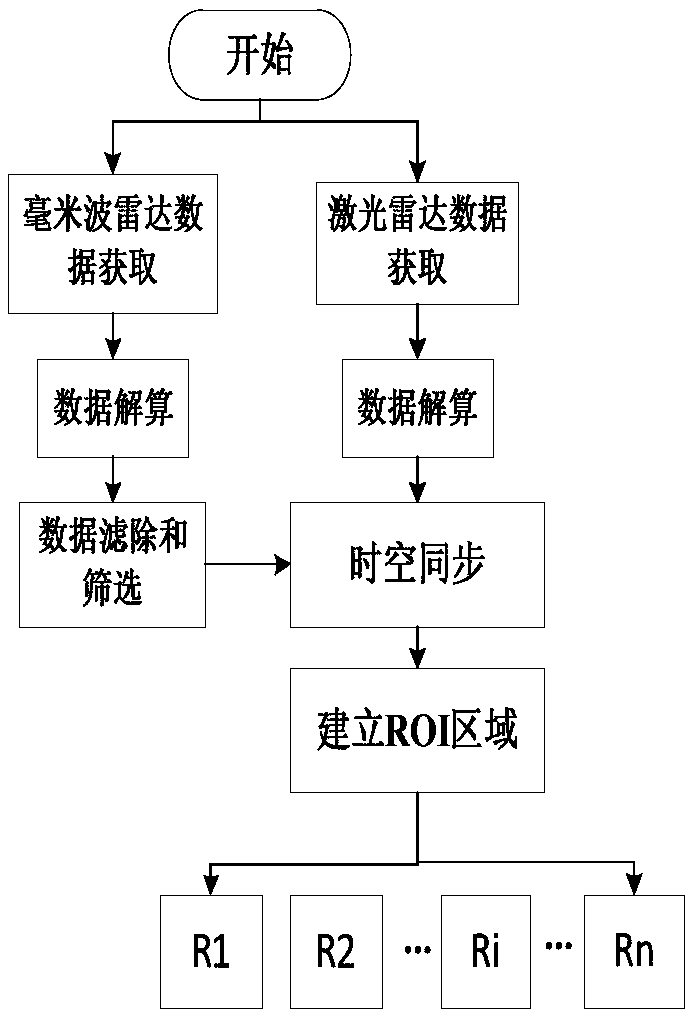
[0046] Step 1. Obtain the raw data of millimeter-wave radar and lidar radar;
[0047]The millimeter-wave radar data is transmitted to the industrial computer through the CAN (Control Area Network) bus, and the update cycle is 50ms; the lidar data is transmitted to the industrial computer through the Ethernet interface; the update cycle is 40ms.
[0048] Step 2. Calculate the raw radar data to obtain obstacle position information;
[0049] After the radar raw data is obtained through step 1, according to the millimeter-wave radar and lidar protocol, the data calculation of the millimeter-wave radar and lidar is respectively realized through computer programming;
[0050] Step 3. Filter the data after the millime
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap