Inverse kinematics analytical solution control method for six-degree-of-freedom mechanical arm
A technology of inverse kinematics and control methods, applied in special data processing applications, instruments, electrical and digital data processing, etc., to achieve the effect of improving the success rate and solving efficient
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0069] In order to have a further understanding and understanding of the characteristics, purpose and functions of the present invention, the present invention will be further described in detail below in conjunction with the embodiments.
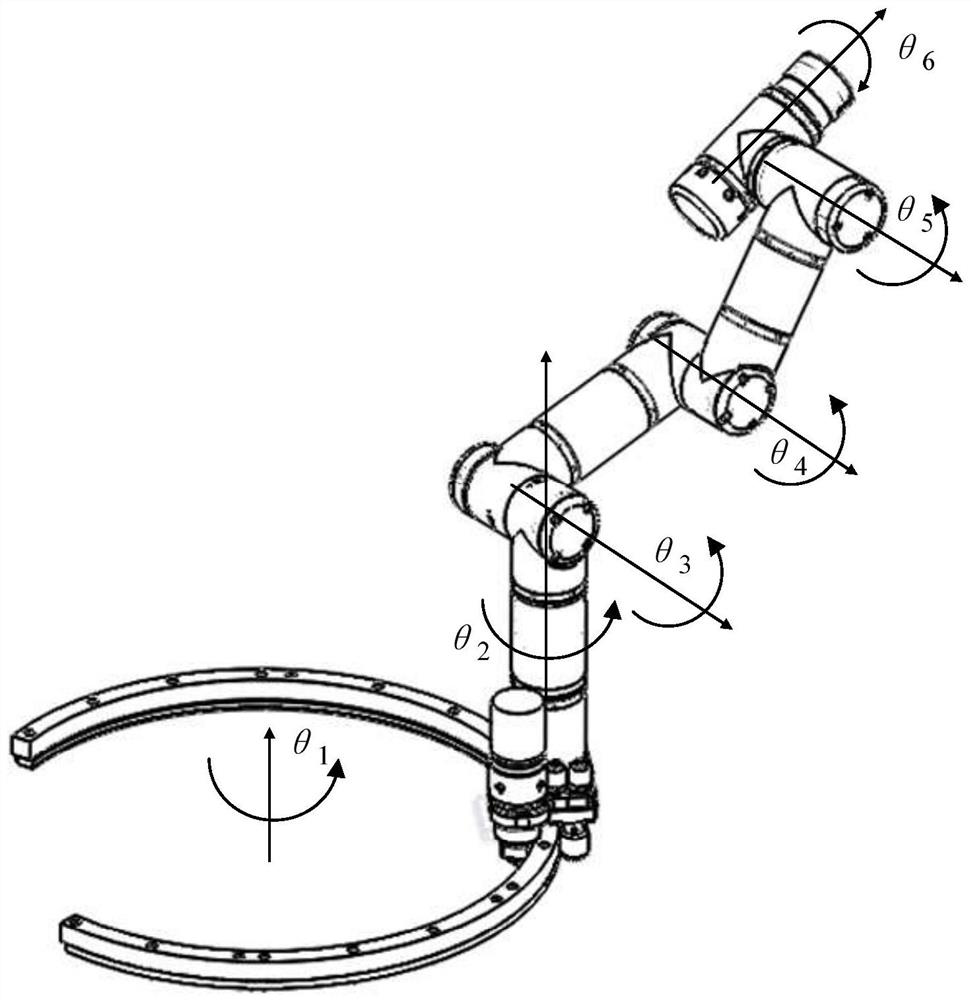
[0070] The present invention takes the configuration of the six-degree-of-freedom mechanical arm of the space station glove box as an embodiment, such as figure 1 As shown, there are 6 rotary joints in total, the first joint is the rotary joint formed by the arc guide rail, the last 5 joints are modular rotary joints, and the joint variables are angle θ 1 , θ 2 , θ 3 , θ 4 , θ 5 and θ 6 . In terms of configuration, the axis of joint No. 2 is parallel to the axis of Joint No. 1, the axis of Joint No. 3 is perpendicular to the axis of Joint No. 2, the axes of Joint No. 4 and No. 5 are parallel to the axis of Joint No. The axis of joint 6 is perpendicular to the axis of joint 5.
[0071] The method steps of position solution include the fo
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap