Monocular camera-based sea surface distance measurement method and system
A camera and single-purpose technology, applied in image data processing, instruments, calculations, etc., can solve the problems of large ranging errors and difficult ranging, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
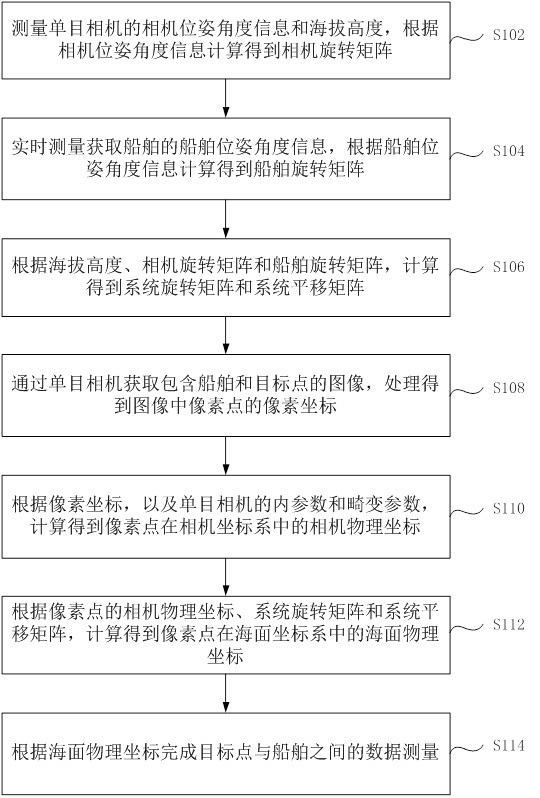
[0052] The embodiment of the present application provides a sea surface ranging method based on a monocular camera, figure 1 It is a flow chart of the steps of the sea surface ranging method based on the monocular camera according to the embodiment of the present application, such as figure 1 As shown, the method includes the following steps:
[0053] Step S102, measuring the camera pose angle information and altitude of the monocular camera, and calculating the camera rotation matrix according to the camera pose angle information;
[0054] Specifically, adjust the angle of the monocular camera so that its shooting field of view covers part of the deck of the ship, and take at least 4 points on the ship deck within the field of view of the monocular camera, so that the 4 points are not collinear and not too concentrated. Draw up a space Cartesian coordinate system, the space Cartesian coordinate system is the ship coordinate system, make the xOy plane on the deck, get the physic
Embodiment 2
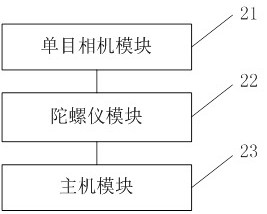
[0093] The embodiment of the present application provides a sea surface ranging system based on a monocular camera, figure 2 It is a structural block diagram of a monocular camera-based sea surface ranging system according to an embodiment of the present application, the system includes a monocular camera module 21, a gyroscope module 22 and a host module 23, wherein the host module 23 is used to process the monocular camera module 21 and the data information provided by the gyroscope module 22, calculate and generate the sea surface ranging result;
[0094] Monocular camera module 21 obtains the image that comprises ship and target point, and host module 23 processes and obtains the pixel coordinate of pixel point in the image;
[0095] The host module 23 calculates the camera physical coordinates of the pixels in the camera coordinate system according to the pixel coordinates, and the internal parameters and distortion parameters of the monocular camera;
[0096] The monocula
Embodiment 3
[0113] This embodiment also provides an electronic device, including a memory and a processor, where a computer program is stored in the memory, and the processor is configured to run the computer program to execute the steps in any one of the above method embodiments.
[0114] Optionally, the above-mentioned electronic device may further include a transmission device and an input-output device, wherein the transmission device is connected to the above-mentioned processor, and the input-output device is connected to the above-mentioned processor.
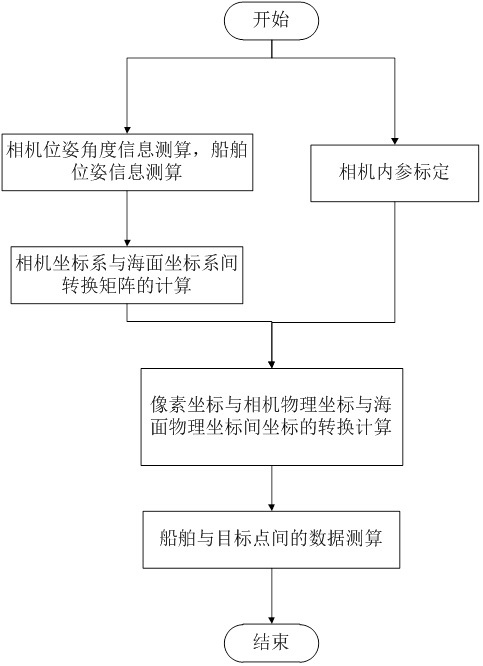
[0115] Optionally, image 3 is a schematic flowchart of a processor executing a computer program in a memory according to this embodiment, such as image 3 As shown, the processor can be configured to perform the following steps through a computer program:
[0116] S1, camera pose angle information calculation, ship pose information calculation;
[0117] S2, the calculation of the transformation matrix between the camera coordinate s
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap