Photoelectric hybrid driven foot type electrostatic adsorption wall-climbing robot
A wall-climbing robot and electrostatic adsorption technology, applied in the field of wall-climbing robots, can solve the problems of loss of adsorption force, destruction of electrostatic adsorption force, friction, etc., and achieve the effect of increasing load capacity, increasing wall-climbing speed, and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
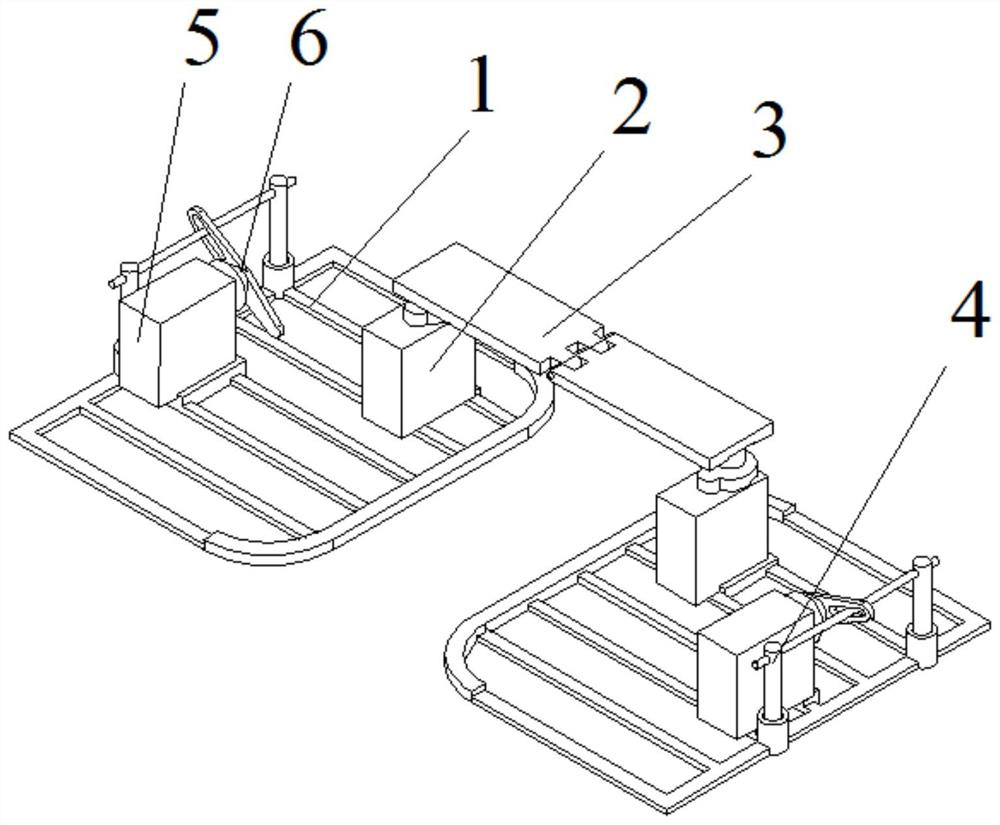
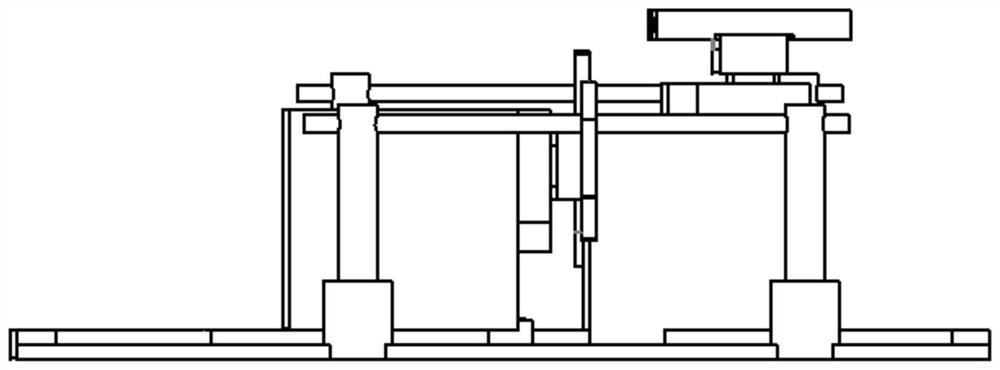
[0045] Specific implementation mode one: refer to Figure 1 to Figure 6 To illustrate this embodiment, this embodiment provides a photoelectric hybrid-driven foot-type electrostatic adsorption wall-climbing robot, which includes two foot structures and a connecting assembly 3;
[0046] The two foot structures are connected through a connection assembly 3, and each end of the connection assembly 3 is rotatably connected with a foot structure;
[0047] The foot structure includes a foot plate 1, a layer of flexible electrodes is attached to the lower surface of the foot plate 1, and the flexible electrodes are connected to the high-voltage module attached to the connection assembly 3 through wires, and a top surface of the foot plate 1 is also installed. The axis of the output shaft of the No. 1 steering gear 2 and the No. 1 steering gear 2 are vertically arranged on the upper surface of the foot plate 1, and the end of the output shaft of the No. 1 steering gear 2 is fixedly conne
specific Embodiment approach 2
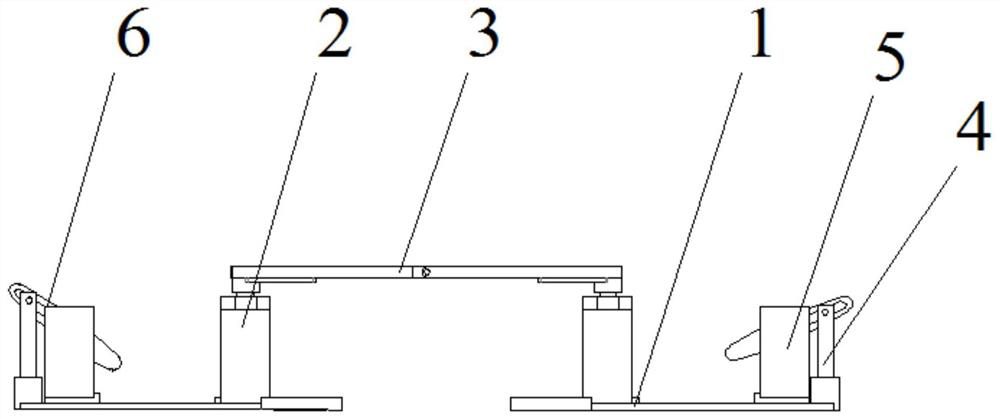
[0049] Specific implementation mode two: refer to Figure 1 to Figure 6 Describe this embodiment, this embodiment is to further limit the connecting assembly 3 described in the first specific embodiment, in this embodiment, the connecting assembly 3 includes two connecting plates 31 and a connecting shaft 32, the two The connecting plate 31 is hinged by a connecting shaft 32, and the lower surface of each connecting plate 31 is processed with a slot, and the end of the output shaft in each No. 1 steering gear 2 is arranged in a slot on the corresponding connecting plate 31, And the end of the output shaft in each No. 1 steering gear 2 is fixedly connected with a connecting plate 31 . Other compositions and connection methods are the same as those in Embodiment 1.
[0050] In this embodiment, the two connecting plates 31 are respectively connected to a foot structure, and the two connecting plates 31 are hinged through the connecting shaft 32, so that when one foot structure is e
specific Embodiment approach 3
[0051] Specific implementation mode three: refer to Figure 1 to Figure 6 Describe this embodiment. This embodiment is to further limit the flexible electrode described in the second specific embodiment. In this embodiment, the flexible electrode is a flexible electrode with a silicone film. The structure is all silicone film, and the middle layer is copper foil. Other compositions and connection methods are the same as those in the second embodiment.
[0052] In this embodiment, in order to overcome the problem of low adsorption force of the flexible electrode made of the traditional PI film, a flexible electrode made of silica gel film is designed. Its structure adopts a three-layer structure, the upper and lower layers are silica gel films, and the middle layer is copper foil (or aluminum foil). The design of the adsorption electrode utilizes the adhesive force between the silica gel film and the wall to reduce the thickness of the air layer between the adsorption electrode
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap