Six-degree-of-freedom face tracking method and device of non-contact physiological detection robot
A non-contact, physiological detection technology, applied in the field of visual servoing, can solve the problems of low operation efficiency and poor tracking effect of dynamic face tracking, and achieve the effect of simplifying the processing process and ensuring the tracking effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image


Examples
Embodiment 1
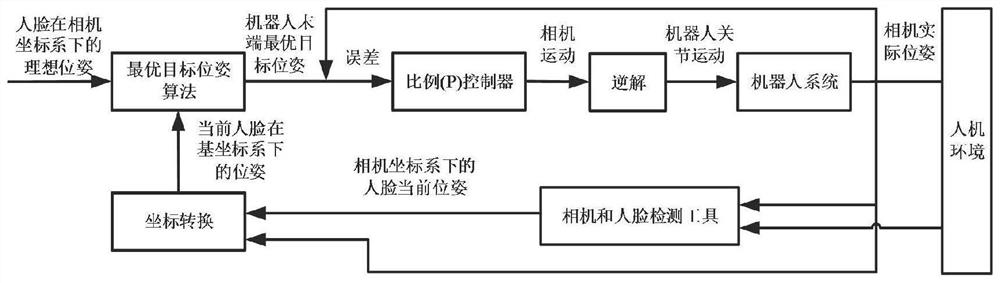
[0106] Such as figure 1 As shown, the present invention provides a 6-DOF human face tracking method of a non-contact physiological detection robot, the method comprising:
[0107] Fix the camera at the end of the robot;
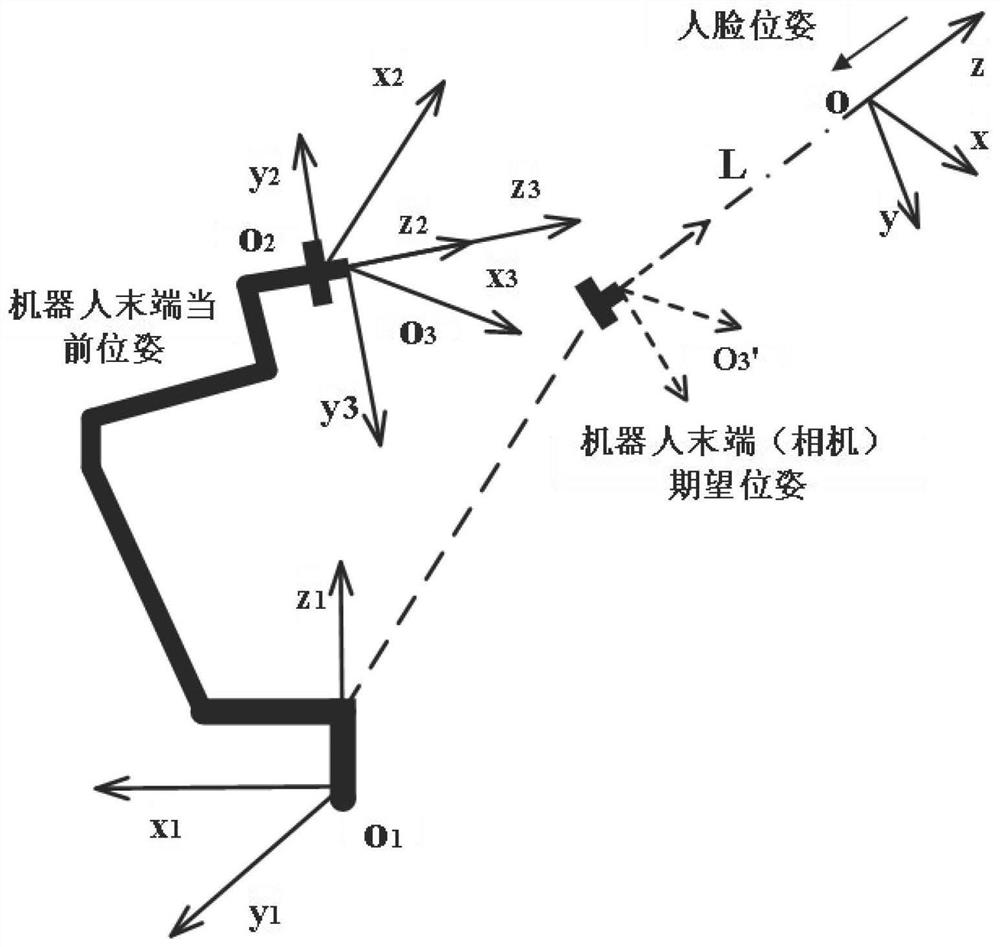
[0108] Real-time facial feature point detection and tracking based on the face image collected by the camera, and the camera coordinate system O 3 The face pose information under p face ;
[0109] The face pose information p face Transformed into a face in the base coordinate system O 1 The lower pose T b ;
[0110] Based on the face in the base coordinate system O 1 The lower pose T b Calculate the optimal target pose T at the end of the robot t ;
[0111] Based on the face in the base coordinate system O 1 The lower pose T b and the optimal target pose T at the end of the robot t Perform proportional control to get the desired pose p target ;
[0112] Based on the desired pose p target Find the inverse kinematics solution to get the target join
Embodiment 2
[0206] A 6-degree-of-freedom face tracking device for a non-contact physiological detection robot, the device includes: a 6-degree-of-freedom robot, a camera fixed at the end of the robot, and a computer for acquiring face images collected by the camera and controlling the robot ;
[0207] The computers include:
[0208] The face pose information acquisition module is used for real-time facial feature point detection and tracking based on the face image collected by the camera, and obtains the camera coordinate system O 3 The face pose information under p face ;
[0209] Coordinate transformation module, used to convert face pose information p face Transformed into a face in the base coordinate system O 1 The lower pose T b ;
[0210] The optimal target pose generation module at the end of the robot is used to base the face on the base coordinate system O 1 The lower pose T b Calculate the optimal target pose T at the end of the robot t ;
[0211] Scale control module,
Embodiment 3
[0215] A computer-readable storage medium, which stores a computer program for 6-DOF face tracking of a non-contact physiological detection robot, wherein the computer program causes the computer to perform the following steps:
[0216] Real-time facial feature point detection and tracking based on the face image collected by the camera, and the camera coordinate system O 3 The face pose information under p face ;
[0217] The face pose information p face Transformed into a face in the base coordinate system O 1 The lower pose T b ;
[0218] Based on the face in the base coordinate system O 1 The lower pose T b Calculate the optimal target pose T at the end of the robot t ;
[0219] Based on the face in the base coordinate system O 1 The lower pose T b and the optimal target pose T at the end of the robot t Perform proportional control to get the desired pose p target ;
[0220] Based on the desired pose p target Find the inverse kinematics solution to get the targe
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap