Motion simulator
A motion simulation and actuator technology, applied in the field of motion simulators, can solve the problem of not being able to experience the low-frequency dilution motion of the platform
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
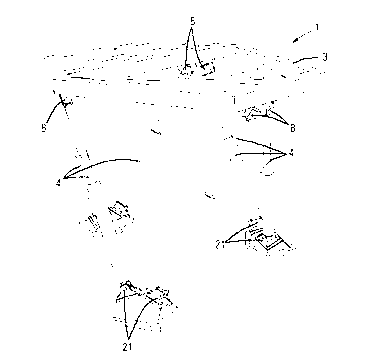
[0015] A motion simulator may be any system with one to and including six degrees of freedom, where the degrees of freedom (DOF) can be x, y, z, pitch, roll, and yaw anyone. Preferably the motion simulator has six degrees of freedom. This note will illustrate the invention of a six degrees of freedom motion simulator. Those skilled in the art can easily understand how the present invention can be applied to a motion simulator with fewer degrees of freedom based on this description. figure 1 is a schematic diagram of an embodiment of a six-degree-of-freedom motion simulator, also known as a Stewart platform or a six-axis platform. The Stewart platform is well known and exemplified in the previously mentioned EP-A-446786 or US-A-2009 / 0047636. figure 1 The motion simulator shown includes a base 2 placed on the ground, and a platform 3 that moves relative to the base 2. For example, a cockpit with a seat can be installed on the platform 3 for users. The plinth may be a single f
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap