Mobile robot path planning method based on multi-core search improved grey wolf algorithm
A mobile robot and path planning technology, applied in the field of robotics, can solve problems such as local optimal convergence accuracy of the algorithm, failure to achieve path planning effect, and low quality, so as to improve uniformity and diversity, increase search range, and adapt Sexual Enhancement Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment 1
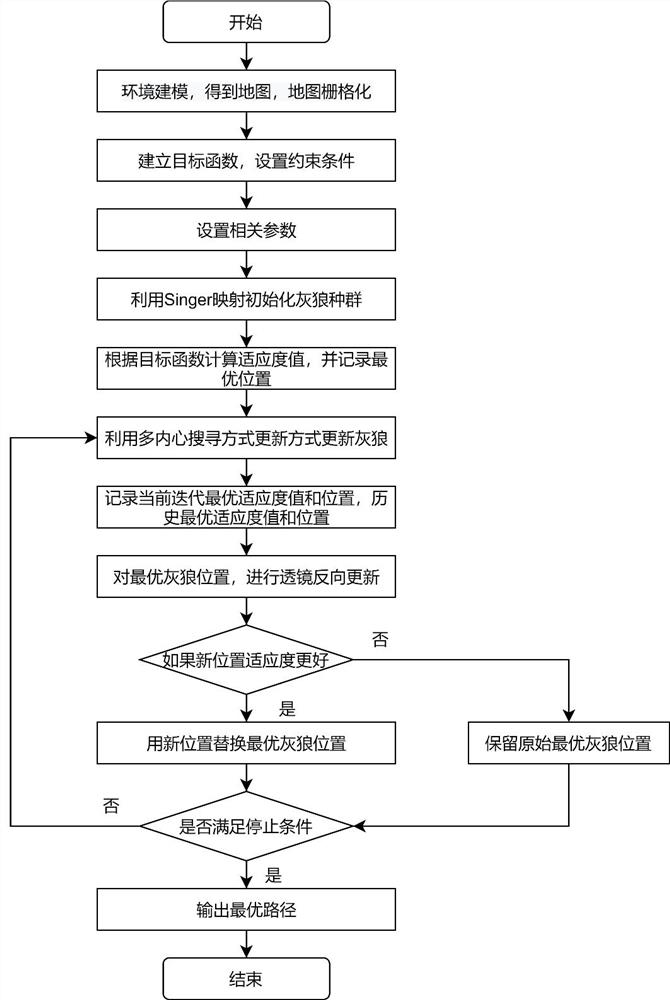
[0064] A kind of mobile robot path planning method of multi-inner search improved gray wolf algorithm of the present invention, such as figure 1 As shown, it specifically includes the following steps:
[0065] S1: Model the environment of the mobile robot, obtain a map of the mobile area, and rasterize the map.
[0066] S2: Establish the objective function of the path planning of the mobile area map, which can be the shortest moving path, the shortest time-consuming or the least energy consumption.
[0067] S3: According to the objective function function Determine the corresponding constraints and the number of key nodes of the path D ;Perform parameter setting, carry out parameter setting, mainly include: the size of the gray wolf population (that is, the number of gray wolf individuals) Popsize ;The maximum number of iterations (that is, the condition for the iteration to stop) Miter ; The lower boundary of gray wolf search optimization LB ; Gray wolf search for uppe
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap