Real-time lane detection system based on monocular vision and inertial navigation unit
A lane line detection and inertial navigation technology, which is applied in the field of real-time urban multi-lane lane line detection systems, can solve problems such as difficulty in long-term and long-distance stable operation, achieve continuous and smooth local vehicle body positioning, and reduce calculation accumulated errors. , the effect of improving adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Example Embodiment
[0032] The present invention will be described in detail below with reference to the drawings.
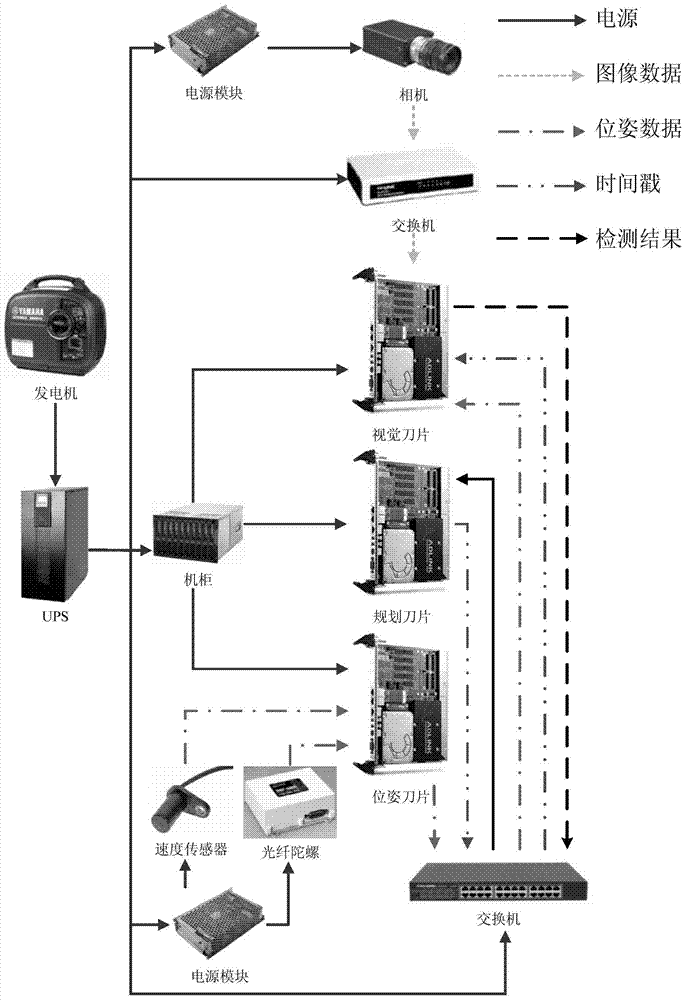
[0033] See figure 1 , The real-time urban multi-lane sensing configuration based on monocular vision and inertial navigation unit and the overall hardware connection diagram installed in the Kuafu No. 1 smart car of Xi’an Jiaotong University are shown in the figure. The system consists of the following types of subsystems: 1. Power system: Yamaha generator provides 220V AC power, which is output from UPS. Except for the sensor itself, which needs to use an additional power module to complete the voltage transformation, other equipment has a supporting independent voltage transformation Equipment; 2. Sensing system: Monocular camera configuration: German Basler digital camera, model: scA640-74gc, lens is Nissan Computar megapixel fixed focal length lens, model: M0814-MP; Inertial navigation unit is configured for vehicle Speed sensor and fiber optic gyroscope DSP3000; 3. Communication s
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap